一、工业机器人测量由机器人引导的工件,在此我们只讨论直接测量法,间接测量法实际当中非常少用,我们就不做介绍。
二、工业机器人引导的工件测量的说明,机器人控制系统将得知工件的原点和其它 2 个点。 此 3 个点将该工件清楚地定义出来。

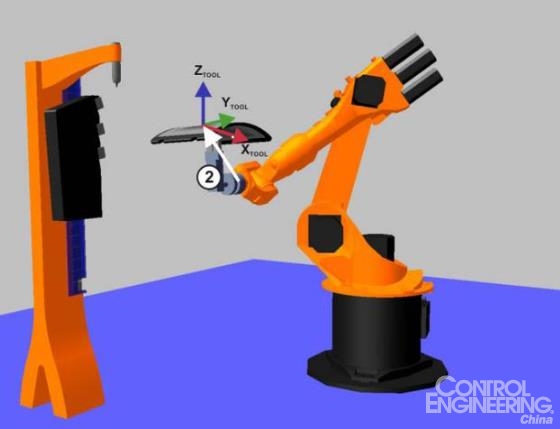
三、工业机器人引导的工件测量直接测量法示意图:
四、工业机器人引导的工件测量的步骤
1、选择菜单序列投入运行 > 测量 > 固定工具 > 工件 > 直接测量。
2、为工件分配一个编号和一个名称。 用继续键确认。
3、输入固定工具的编号。 用继续键确认。
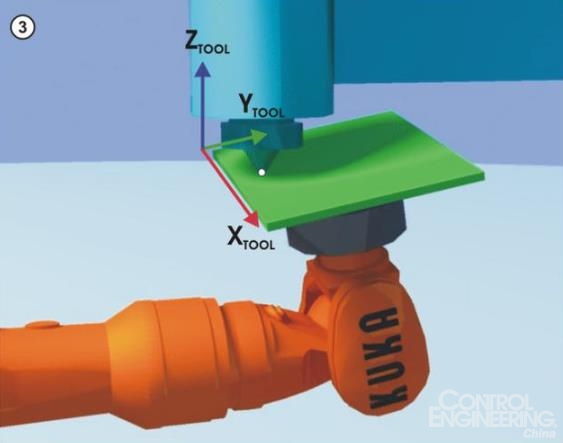
4、将工件坐标系的原点移至固定工具的 TCP 上。点击测量键并用是确认位置。
5、将在工件坐标系的正向 X 轴上的一点移至固定工具的 TCP 上。点击测量键并用是确认位置。
6、将一个位于工件坐标系的 XY 平面上、且 Y 值为正的点移至固定工具的TCP 上。点击测量键并用是确认位置。
7、输入工件负载数据,然后按下继续。
8、按下保存键。